
Associate Professor of Mechanical Engineering Jianguo Zhao has earned his title of robot builder extraordinaire.
With his third award from the National Science Foundation since 2018, Zhao and collaborators at North Carolina State University will take another step forward in robotics research. His latest grant builds upon existing funding to study shape morphing robots and flying and perching robots.
Engineering Source sat down with Zhao for a Q&A on his latest endeavors.
Q: How has your research evolved over the past year?
A: Since last year and with the latest NSF award, we’ve been studying soft robots – i.e. robots that are made out of rubber-like materials driven by artificial muscles. We’re investigating how to increase the force they can generate. Because of their inherent softness, this kind of robot cannot create much power. To address this problem, the project proposes to leverage mechanisms that can rapidly switch between states to reconfigure a robot’s shape and motion.
Q: What are your goals with this work?
A: The goal of our research is to enable adaptive robots that can reconfigure their body in response to external environments.
Robots made of metals, hard plastics, or similarly high stiffness materials are restricted in range of motion and shape change. After a robot is built, its body is generally fixed.
It would be extremely beneficial if a robot could be reconfigured on-the-fly to generate shapes and motions required for various tasks such as walking, crawling, and jumping. The research will also develop novel robots with multi-modal locomotion capabilities that can adapt to environments without modifying their mechanical structure.
Q: What are the applications of soft robots and who is interested in using them?
A: In practice, soft robots can be used for robotic manipulation tasks like a human hand grasping objects, or locomotion tasks similar to animals traversing their natural environments.
For manipulation, soft robots are ideal for grasping fragile objects such as raw eggs due to the material of their grippers. Traditional rigid grippers can only achieve this through expensive sensors that measure force to avoid damaging objects. Soft robots could be used for automating the food industry to grasp and package delicate products such as bread or strawberries.
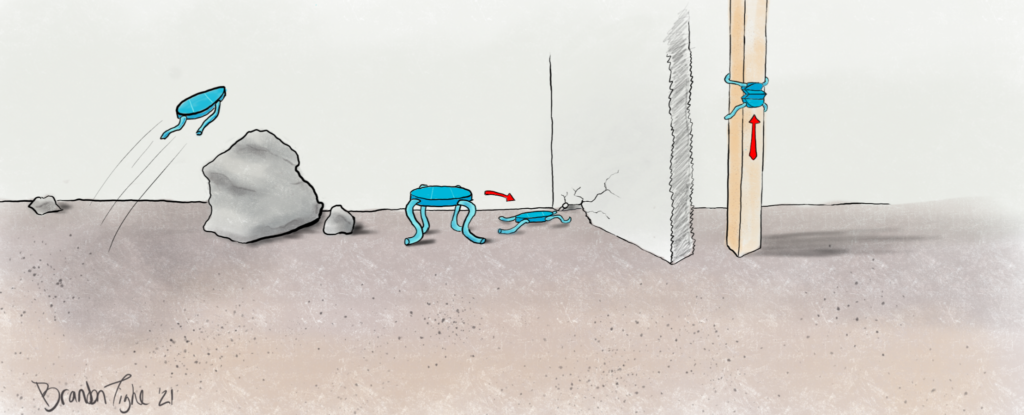
For locomotion, soft robots can be designed to actively adapt to their surrounding environment. For instance, a robot for search-and-rescue after an earthquake should be able to traverse above debris, crawl into cracked holes, inch inside a pipe, climb on a pole, or hand over medical supplies to survivors trapped in the area. All of these require the robot to change its body and leg configurations on the fly. These kinds of robots would be very useful in events such as the Florida tower collapse. Existing single-function robots cannot deal with environments that a soft robot could.
Q: What are the differences between mechanical and electrical engineering in regard to robots?
A: I would rephrase the question to the difference between the body (mechanical structure) and the brain (computation). The mechanical structure is what makes up a robot so that it can interact with the environment through force interactions. This includes grasping an object using robotic fingers or traversing different terrains for a legged robot. The brain is the high-level computational aspect that senses the surrounding environment and makes decisions. For example, a robot can use a camera to detect obstacles and then avoid them. Both body and brain are important for a robot.
Q: Why are people so interested in robots?
A: I think it might be because there are many movies about robots – Transformers, Terminators, Big Hero Six. People would love to see if we can create intelligent machines like humans.